【重點觀念:真正讓系統長期穩定運作的,不是功能強大,而是可控性高】
在 TRIZ 的創新架構中,「提高效率」讓事情做得更快,「消除害處」讓事情不出錯,而「增強控制(Control)」則讓事情可預期、可掌握、可穩定。「增強控制」是第三個核心目標,也是最常被忽視的一環。
很多系統「能動」,卻「不可控」:
• 流程已建立,但結果品質忽高忽低
• 系統有效率,但只能靠特定人員維持
• 問題不是沒做,而是做了卻無法即時修正
很多人在推動創新時,只關注「做得快」(效率)或「不出錯」(消除害處),卻忘了一個更根本的問題:這個系統,人能不能看得清楚它的狀態?能不能輕鬆地調整它?能不能讓它自己照顧自己?
增強控制類原理(12, 13, 16, 23, 24, 25, 26, 27)的核心智慧,不在於增加更多監控設備,而在於將可控性內建於設計之中。透過三個層次的升級:
第一層次「感知層」:讓系統狀態變得可見(原理 23 回饋、原理 24 中介物、原理 26 複製);
第二層次「執行層」:讓操作邏輯變得更聰明(原理 12 等位性、原理 13 反向操作、原理 16 不足或過度作用);
第三層次「進化層」:讓系統具備自主能力(原理 25 自助服務、原理 27 廉價替代品)——達成「降低人為干預、減少判斷負擔、提升結果可預測性」的目標。
這套方法的核心智慧在於:最好的控制不是更用力控制,而是設計系統讓控制變得不必要。看得見才能管得到,用得準才不浪費力氣,跑得穩才是真正的高效。
尋找問題的重點口訣:「哪裡看不見?哪裡難以調整?哪裡需要人一直盯著?」
增強控制的重點口訣:「見、準、穩——感知可視化,操作降維度,系統自主化。」
文章引導|為什麼你需要學「增強控制」?
在前兩篇文章中,我們談了兩件事:
- 第一篇談「提高效率」——讓系統更快、更省、更順
- 第二篇談「消除害處」——讓系統更穩、更安全、活更久
但在實務世界裡,當效率和安全都處理好之後,會浮現另一個更難說清楚的問題:
- 事情不是做不完,而是結果不穩定
- 不是沒努力,而是品質忽高忽低
- 不是沒有制度,而是出問題時來不及反應
- 系統運作中像個黑箱,發生什麼事只能等結果出來才知道
很多人遇到這種狀況,第一個念頭是「多設幾個表單」、「再加幾個主管」、「把規定說明得更清楚」。但 TRIZ 告訴我們一件更關鍵的事:這些都是治標不治本——問題不是規定不夠多,而是系統本身的可控性設計不足。
如果說「提高效率」是引擎,「消除害處」是煞車,那麼「增強控制」就是你的儀表板與方向盤。沒有方向盤,油門踩再快也會失控;沒有儀表板,煞車踩得再穩,也不知道何時該踩、往哪裡踩。
閱讀本文,你可以獲得三個實際好處:
- 提升預測力:透過回饋機制隨時掌握進度,不再憑感覺工作,讓問題在擴大前就被發現
- 降低管理成本:讓系統學會「自己照顧自己」,減少人為監控負擔,從「需要人盯著」走向「讓系統自己跑穩」
- 精準降維打擊:學會用聰明的施力(操作槓桿)取代盲目的努力,讓系統本身吸收複雜度,而不是把負擔丟給人
換句話說:閱讀本文後,當你再次面對「系統能動但難以掌控」的困境時,你將更像一位系統設計師,而不是消防員——不是到處救火,而是設計一個不容易失火的系統。
延續前兩篇的分類架構,本文聚焦於四大類中的第三類——增強控制(Control)。
四大類發明原理對照
- 第一類:提高效率(Efficiency)——目標:優化效能、加速產量、節省能源(原理 10, 14, 15, 17, 18, 19, 20, 28, 29, 35, 36, 37, 40)
- 第二類:消除害處(Harm Reduction)——目標:解決噪音、污染、摩擦或流程中的冗餘(原理 2, 9, 11, 21, 22, 32, 33, 34, 38, 39)
- 第三類:增強控制(Control)——目標:提升精準度、簡化操作、增加回饋(原理 12, 13, 16, 23, 24, 25, 26, 27)👉 本篇文章聚焦於此類
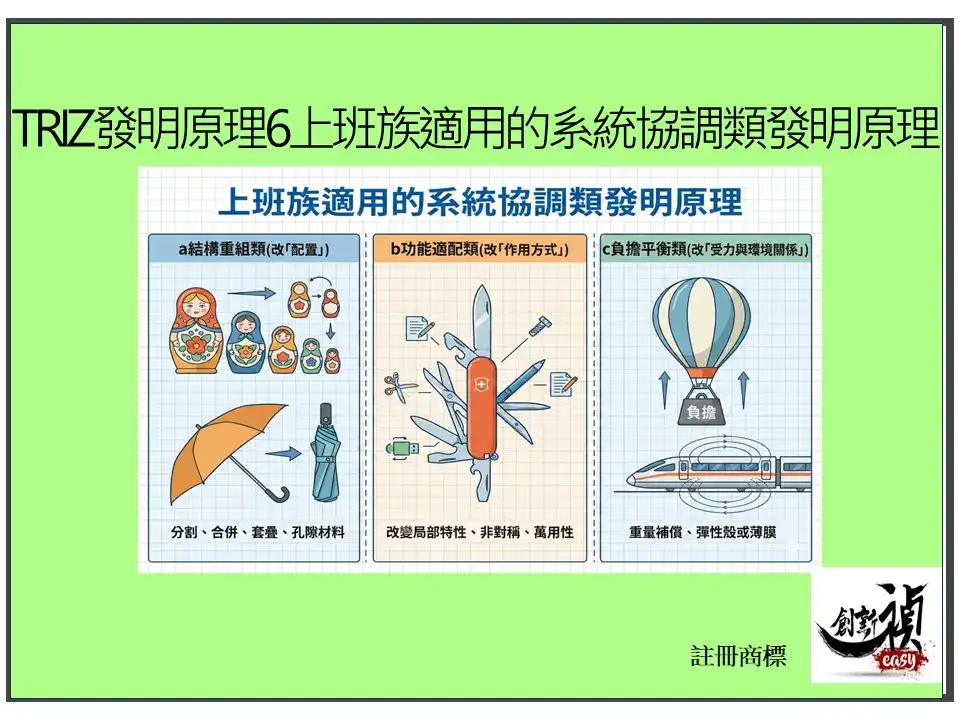
- 第四類:系統協調(Coordination)——目標:整合組件、解決不和諧、跨部門協作(原理 1, 3, 4, 5, 6, 7, 8, 30, 31)
第三類:增強控制(Control)的核心精神
這一類原理的核心,不在於讓系統「做更多事」,而在於——
👉 讓系統的狀態、結果與偏差,都能被清楚地看見、調整、與自主修正。
本文將這 8 個原理整理為三個層次(次類別),分別對應控制的三個層次:感知層、執行層、進化層,形成一個從「看得見」到「用得準」再到「跑得穩」的完整控制成熟度階梯。
一、為什麼「增強控制」是創新的第三優先目標?
1.系統能動,不代表系統可控
在實務中,系統常會歷經三個發展階段:
第一階段:先讓事情做得完(效率)
第二階段:再讓事情不出錯(消除害處)
第三階段:最後才發現——事情難以掌握,看不清楚、調不精準、跑不穩定
這時候的問題,不是「做不動」,而是「看不見」加上「用不準」加上「需要一直人工介入」。這是典型的可控性不足——控制力不足,本質上是系統資訊流斷裂與操作槓桿失靈。
你可能遇過這樣的場景:
- 設備效率很高,但參數調整複雜,只有特定人員會操作,一旦關鍵人物離開,品質立刻崩壞
- 新流程消除了浪費,但步驟太多,執行者常搞混,需要大量人工確認
- 系統運作穩定,但缺乏回饋機制,出問題時無法即時察覺,往往要等到結果出來才知道
這些都是典型的「功能到位,但控制不足」的問題。
這些問題的本質是:
系統資訊流斷裂(看不見,問題往往在擴大後才被發現。)
操作槓桿失靈(調不準,參數複雜、牽一髮動全身。需要高手才能操作。)自主能力不足(跑不穩,必須人工長時間盯著。一旦沒人介入就失控。)
這三個問題,對應控制成熟度的三個層次。
2.從專利分析看:可控性是系統成熟度的關鍵
阿舒勒在分析大量專利後發現:當系統發展到一定成熟度後,創新的重點會從「功能提升」,轉向「控制精度與穩定性提升」。能夠讓複雜系統變得易於操作的發明,往往具有極高的市場價值——因為這類創新不只解決技術問題,還同時解決了使用者體驗、維護成本、與品質穩定問題。
這也是為什麼,在 40 個發明原理中,有整整 8 個專門針對控制增強。
3.增強控制的本質:讓系統「聽話」也「說話」
什麼叫「聽話」?就是系統能精準回應操作者的意圖,調整容易、反應快速、不會過度或不及。
什麼叫「說話」?就是系統能主動回饋狀態資訊,讓操作者隨時掌握運作情況,不必猜測或等待。
這不是奢侈需求,而是系統可靠性與可維護性的必要條件。也是 TRIZ 控制類原理想要幫你達成的核心目標。
二、增強控制類原理的三層次成熟階梯:從「看見」到「自主」
最清楚且易用的分類方式,是依控制成熟度分為三層次:
看得見(感知層)→ 用得準(執行層)→ 跑得穩(進化層) 這是一個控制成熟度的階梯,也是你面對「可控性問題」時最直覺的思考順序。 控制三層次的時間邏輯:事前(感知層)→ 事中(執行層)→ 事後(進化層)
1.第一層次:看得見——建立資訊流的可視化與精準化(感知層)
核心邏輯:控制的前提是「知覺」。
看不見的東西,無法控制。
這個層次解決的核心問題是:系統中有哪些關鍵狀態,是「隱藏的」或「難以觀察的」?
對應原理:有23、24、26三個,共同構成資訊層的感知系統。
1-1 原理 23 反饋(Feedback)
建立閉環回饋機制,使輸出結果回流修正輸入。
回饋路徑是所有控制的起點:沒有回饋,系統就像閉著眼開車。引入回饋以改善過程或動作;如果回饋已經存在,則改變其大小或影響。
應用思維:
- 即時數據看板
- 進度可視化
- 異常警示機制/必須能觸發修正
回饋的關鍵不是「事後報告」,而是「即時修正」。
典型例子:恆溫空調根據室溫自動調整出風量、自動對焦相機、儀表板警示燈、自適應巡航系統。
應用情境:設置「週進度看板」讓所有人都能即時看到進度;讓良率數據即時顯示在螢幕上,讓問題在下一個班次之前就被發現,而不是等到月底統計;客戶滿意度即時回饋、每日站立會議、即時數據儀表板。
1-2 原理 24 中介物(Intermediary)
當狀態難以直接觀測時,用中介物轉換成可見訊號。
中介物是一種「翻譯器」——把難以理解的訊號,轉換成容易感知的資訊。
例如:
- 抽象數據 → 視覺圖表
- 溫度 → 顏色變化
- 風險 → 指標燈號
中介物讓不可見變可見。
典型例子: 溫度感應貼片將不可見熱能轉為顏色變化、數位儀表將流量可視化、變速箱控制引擎與輪胎之間的動力傳遞、用流程圖呈現複雜關係。
應用情境:無法直接感知機台內部溫度,但可以透過感應貼片讓問題一眼被發現;透過數據報表觀察抽象的業務狀況;用視覺化圖表取代難以解讀的數字;用標準化合約條款作為中介,讓潛在風險變得具體可見。
但要注意:
過多中介層會造成資訊失真。
1-3 原理 26 複製(Copying)
用模型或副本代替實體觀測,降低控制成本,在不傷害實體的情況下獲得資訊。
複製不只是備份,而是建立一個「安全的觀測環境」。
典型方式:
- 測試環境
- 沙盤推演
- 數位雙生(Digital Twin)
- 模擬壓力測試
典型例子:飛行模擬器讓飛行員練習而不必操作真實飛機、數位雙生(Digital Twin)即時模擬真實系統狀態、沙盤推演、模擬測試。
應用情境:新功能上線前,先在「測試環境」(正式系統的複製)中驗證;重大決策前,先用「情境模擬」測試策略;透過視訊會議代替出差(控制溝通成本);先用小規模 A/B 測試,再全面推行。
這讓你在低成本下獲得高價值資訊。
這一層次的任務,是把不可見變可見。
感知層總結
這一層次的任務是:
把黑箱變透明。
沒有透明度,就沒有控制。
這三個原理的共同任務,是把「不可見的狀態」轉換成「可以被觀察與利用的資訊」。當你遇到「問題總是太晚發現」、「決策憑感覺」時,請先問:我的系統有「看得見」嗎?這是所有控制升級的起點。
2.第二層次:用得準——操作邏輯的簡化與降維(執行層)
當系統看得見後,下一步是:
能不能容易調整?
核心邏輯:
最好的控制,不是更用力,
而是更聰明地施力。
感知層解決「看不見」問題。
執行層處理的是——
- 為什麼調整這麼困難?
- 為什麼操作必須靠高手?
- 為什麼參數一動就全面失衡?
這個層次解決的核心問題是:現有的操作方式,是否比實際需要的更複雜?能不能讓系統本身吸收複雜度,而不是讓人去承受?
對應原理:12、13、16
2-1 原理 12 等位性(Equipotentiality)
消除位能差或環境落差,使控制不需要額外做功。
當系統的各個部件或介面處於同一水平或能量基準時,操作自然變得輕鬆——不需要「爬上爬下」或「彎腰搆高」。
應用思維包括:
- 降低空間移動與資訊跳轉
- 將常用功能置於同一層次
- 常用介面集中在同一位置
- 重要參數整合在同一控制面板
- 把調整權限下放到適當層次
典型例子: 升降桌讓工作介面移到最舒適的高度、生產線上保持所有機台同高避免升降設備、遙控器讓操控從遠端進行。
應用情境:把需要頻繁操作的控制介面,移到操作者最順手的位置,而不是讓人去適應不合理的布局(人機介面的等位性);把所有需要調整的參數集中在同一個儀表板,而不是散落在多個系統中(資訊的等位性);把決策資訊拉到第一線,讓操作介面簡化。
等位性的本質,是降低操作摩擦。
如果每次調整都要跨系統、跨界面、跨權限,那代表等位性不足。
2-2 原理 13 反向操作(The Other Way Round)
改變施力方向或動靜關係,化阻力為助力。
當正向操作很困難時,反向思考往往更簡單。
當正向解法受阻時,試著反過來思考——不是讓人去適應系統,而是讓系統來適應人。將原本不動的變為動的,動的變為不動的;或者將過程倒過來設計。
典型邏輯:
- 不是人去找資料,而是資料推送給人
- 不是使用者從零設定,而是提供預設範本
- 不是事後檢查,而是事前提醒
典型例子: 洗車機是最直觀的案例——不是車子動,而是刷子動,讓控制環境變得更單純;跑步機讓人原地跑步(地面動而人不動)。
應用情境:與其「要求人去找資料」,不如「讓資料主動推播給人」;與其「讓使用者從零輸入設定」,不如「提供預設範本讓使用者刪減」(反向操作降低操作門檻);不要事後檢查,而是事前提醒;讓系統自動提示錯誤,而不是要求人記住所有規定。
反向操作的核心,是把「主動負擔」轉移給系統。
這是一種降維控制,降低控制門檻。。
2-3 原理 16 不足或過度作用(Partial / Excessive Action)
放棄 100% 的絕對精準,改採邊際策略,以「先過量再修正」或「先達成部分」來換取效率。
這不是降低品質的妥協,而是分階段逼近目標的務實精準策略。—先做到「稍微不足」或「稍微過度」,再微調。
兩種常見模式:
- 先不足(做到 70~80% 再微調)
- 先過量(超過目標再裁切)
這種方式能:
- 降低一次到位的壓力
- 減少過度設計
- 提高調整效率
執行層的共同任務是:
讓系統吸收複雜度,而不是讓人承擔複雜度。
典型例子:刷油漆時先塗過界再修齊(比一開始就追求完美邊界更有效率);自動化裝填時先裝 95% 再精準補足。
應用情境:快速原型開發先做到 60-80%,確認方向後再精細化,避免在錯誤方向上過度投入;「粗調旋鈕 + 微調旋鈕」的雙層設計,讓參數調整既快速又精準;MVP(最小可行產品)先試行再優化;先快速達到主要目標,再處理剩下的細節。
執行層總結
這一層次的任務是:
讓系統吸收複雜度,而不是讓人承擔複雜度。
這三個原理的共同目標,是讓「施力方式更聰明」——不是要求人更精準、更努力,而是重新設計控制的結構與方向,讓系統本身降低操作難度。當你遇到「操作太複雜」、「錯誤率高」、「精準要求成本過高」時,請問:能不能改變施力方式?
3.第三層次:跑得穩——系統自主化與資源槓桿(進化層)
當系統可觀測、可調整後,最後一層次是:
能不能不用人盯?
核心邏輯:
讓系統具備「自我管轄」的能力——跑得穩,減少人為干預的負擔。
這一層次的問題是:
- 哪些環節需要人一直盯?
- 哪些錯誤可以自動修正?
- 哪些風險可以低成本吸收?
對應原理:25、27
3-1 原理 25 自助服務(Self-Service)
讓系統利用廢棄資源或內建功能,實現「自己照顧自己」。
自助服務不只是「自動化」,而是讓系統具備自我監測、自我診斷、自我回報的能力——讓物體透過執行輔助功能來服務自己,或利用廢棄材料與能量。
例如:
- 系統健康檢查
- 自動錯誤提示
- 自動警示
典型例子: 自動補水的飲水機、軟體系統的自動更新與健康檢查(Health Check)功能、汽車儀表板主動顯示油量與胎壓、印表機主動提示墨水不足。
應用情境:系統定期自查關鍵指標並自動回報異常,而不必等人去詢問;廢熱回收系統,利用機器運作的廢棄熱能來加熱廠房(「廢物變資源」的同時也減少了一個需要人工管理的環節);SOP 內建檢核清單,讓流程自動提醒下一步;自動提醒機制,讓系統主動「說話」。
這種設計會大幅降低人工監控負擔。
3-2 原理 27 廉價替代品(Cheap Short-Living Objects)
透過廉價且可更換的物件,將複雜的維護控制簡化為「簡單的更換」。
當控制成本太高時,與其追求精準維護,不如讓低成本元件承擔風險——用多個廉價物品取代昂貴耐用品。
核心思維:
不追求永不失敗,
而是讓失敗代價可控。
典型策略:
- 保險絲吸收突波
- 備援副本
- 拋棄式元件
- 預設範本
典型例子:保險絲是最經典的案例——不是讓精密電路去承受突波,而是讓廉價的保險絲代為「犧牲」,保護昂貴設備;拋棄式醫療手套用完即丟不必消毒,同時消除了交叉感染的風險。
應用情境:在軟體中,使用容器技術(Docker),環境出問題就直接刪除重啟一個新的,比花大量時間除錯更有效率;預設參數範本,讓初次使用者不必懂每個細節就能快速上手;短期合約代替長期綁定;小規模試點代替全面改版;用一次性密碼(OTP)吸收安全風險,用完立即失效,不累積風險。
這是一種風險轉嫁設計。
4.進化層總結
這一層次的任務是:讓系統具備自治能力。
這一層次兩個原理的共同目標,是讓系統具備「自治能力」——系統能自己監測、自己回報、自己吸收小風險,減少需要人工持續介入的場景。當你遇到「沒人盯就出事」、「維護成本高」、「系統高度依賴人」時,請問:能不能讓系統自己跑?
三、整體邏輯與組合模式
1.三層次控制的整體邏輯
整合三層次後,可以形成一個清楚的成熟階梯:
第一層次:看得見(感知層)
第二層次:用得準(執行層)
第三層次:跑得穩(進化層)
如果感知層不足,就會變成黑箱系統。
如果執行層不足,就會變成高門檻系統。
如果進化層不足,就會變成人工依賴系統。
真正成熟的系統,三層次都具備。
2.典型整合應用模式(跨原理組合)
在實務中,增強控制類原理很少單獨使用,更常見的是多個原理形成「組合拳」,產生幾種重複出現的有效控制模式。常見有四種組合模式:
2-1模式一:先看清楚再動手——可視化感測型控制
核心原理:23 回饋 + 24 中介物 + 26 複製
這類模式的重點,是讓系統狀態在行動前就能被充分掌握,避免在不清楚情況的狀態下做決定。
典型應用流程:
- 設置回饋路徑(原理 23):建立讓輸出結果回流到決策點的機制
- 建立可觀測的中介轉換(原理 24):將難以直接感知的狀態轉為可見訊號
- 用模擬環境預先驗證(原理 26):在真實行動前用副本測試,確認後再執行
這種模式特別適合高風險、高成本、或無法立即逆轉的場景——手術前的詳細影像診斷、正式上線前的壓力測試、重大採購前的樣品評估。
2-2模式二:把複雜變簡單——操作降維型控制
核心原理:13 反向操作 + 27 廉價替代品
不再讓操作者從無到有設定,而是提供「預設範本」讓使用者刪減(原理 13 的反向邏輯),並提供用完即丟的「設定精靈」(原理 27),降低每次設定的複雜度與風險。
典型應用流程:
- 反向設計介面(原理 13):提供預設值讓人刪減,而非從空白開始填寫
- 一次性工具降低門檻(原理 27):設定精靈、入門範本、臨時測試環境用完即棄
- 搭配視覺化引導:顏色、形狀、位置引導正確操作,讓錯誤選擇變得「不自然」
2-3模式三:讓調整更精準——邊際容錯型控制
核心原理:12 等位性 + 16 容錯邊際
將關鍵旋鈕或介面移到最順手的位置(原理 12),並採用「粗調(快速接近目標)+ 微調(精確到位)」的雙層設計(原理 16),讓參數調整既快速又精準。
這類模式在需要高精度調整的場景特別有效——設備校準、快速原型測試、漸進式改善計畫。先快速達到主體目標,確認方向正確後,再投入精力做精細化,避免在錯誤方向上過度投入。
2-4模式四:讓系統自己跑——自主調節型控制
核心原理:25 自助服務 + 23 回饋
這類模式的目標,是減少人工持續介入的需求,讓系統具備自我監測與修正的能力。
典型應用流程:
- 建立自我監測機制(原理 25):讓系統定期自查關鍵指標,並自動回報異常
- 連接回饋迴路(原理 23):讓異常訊號能自動觸發修正動作,而不是等人發現再處理
恆溫空調、自適應巡航系統、軟體的自動擴容機制,都是這個模式的典型案例。這相當於建立「例外管理制度」——系統自動處理正常情況,只在例外發生時才通報人工介入。
2-5模式五:用便宜的犧牲換穩定——風險轉嫁型控制
核心原理:27 廉價替代品 + 26 複製(備援)
這類模式的精髓是:與其讓昂貴系統暴露在風險中,不如讓廉價元件代為承擔。重點不是「讓系統永不失敗」,而是「讓失敗的代價變得可以接受」。
典型應用流程:
- 識別系統中最脆弱、最容易出問題的環節
- 設計廉價的替代元件來「承擔犧牲」(原理 27):一旦這個環節出問題,換掉廉價元件就好,不影響核心系統
- 建立備援複製(原理 26):確保主系統失效時,副本能立即接手
這種模式在風險管理中極為有效——備份系統、備援電源、保險絲設計、分散式部署,都是這種思維的具體實現。
3.增強控制類與前兩類發明原理的關係
效率是油門。
消除害處是煞車。
增強控制是方向盤與儀表板。
沒有方向盤,跑再快都危險。
四、用三個維度自我評估你的系統可控性
理解了三個層次後,你可以用這三個問題,快速診斷一個系統(或工作流程)目前的可控性等級。針對最弱的維度優先改善,效益最大。
1.維度一:可觀測性(Observability)——你看得見嗎?
- 系統的關鍵狀態,能即時被觀察到嗎?
- 異常發生時,你能在多快時間內察覺?
- 歷史資料是否可追溯?問題發生後能回溯原因嗎?
改善工具:原理 23(回饋)、原理 24(中介物)、原理 26(複製/模擬)
2.維度二:可調整性(Adjustability)——你用得準嗎?
- 系統的參數,調整起來是否順暢?還是「牽一髮動全身」?
- 操作者需要具備多高的技能才能進行調整?新手要多久才能學會?
- 從「想調整」到「調整完成」,需要幾個步驟?是即時生效還是需要等待?
改善工具:原理 12(等位性)、原理 13(反向操作)、原理 16(容錯邊際)
3.維度三:自主性(Autonomy)——跑得穩嗎?
- 系統有多少環節「必須靠人持續盯著」?
- 系統能主動發現並處理常規問題,還是全靠人工介入?
- 當元件出問題時,更換或修復的成本與難度如何?
改善工具:原理 25(自助服務)、原理 27(廉價替代品)
自我診斷口訣:「哪裡看不見?哪裡難調整?哪裡需要人盯?」——找到最弱的維度,就是你的優先改善點。在同等效果下,簡化步驟 > 自動化 > 增加功能。最好的控制是「減少一個操作步驟」,而不是「多加一個按鈕」。
五、常見誤用
5-1誤用一:把「增強控制」等同於「加強管控」
增加規定 ≠ 提升控制。
最常見的誤解,是把增強控制理解為「更多規定、更多檢查、更多監督」。這恰恰相反。好的控制設計,應該讓人感覺更輕鬆,而不是更緊繃。如果控制措施讓執行者感到被盯、被限制、被懷疑,那用的可能是管理壓力,不是 TRIZ 發明原理。
⚠ 判斷標準:如果控制措施讓系統變慢、讓人更焦慮、讓彈性消失,那是過度控制,請回頭檢視設計是否真的在解決問題。
5-2誤用二:功能越多等於控制越好
過多回饋會形成資訊噪音。
增加控制參數、增加監測指標、增加回饋管道,不等於提升可控性。過度回饋(原理 23 用過頭)會產生資訊噪音,讓操作者更難做出正確判斷,反而降低效率。同樣地,為了增加「可調參數」而讓介面密密麻麻,這叫「過度設計」,不是創新。
正確的做法:常用功能放在一級選單(原理 13 反向操作:讓常用的浮出來),進階功能收在後面(原理 16:先滿足大部分需求)。真正的增強控制,是讓使用者「感覺不到在控制」——就像自動排檔車,你不必想「現在該換幾檔」,系統自己處理了。
5-3誤用三:只改局部,忽略系統整體
好的自動化應保留人工介入機制。
增強控制改善後,可能會引發新的協調問題。例如:當每個部門都建立了自己的回饋系統,可能出現各系統資料格式不相容、指標定義不一致的問題。
這時候,需要進入「第四類:系統協調」的發明原理,進行新一輪的整合。這正是 TRIZ 的精髓:創新是一個螺旋上升的過程,每解決一個層次的問題,就會進入更高層次的挑戰。
警惕中介物(原理 24)帶來的隔閡——中介物能簡化操作,但過多層級會導致「傳聲筒效應」造成資訊失真。在設計控制機制時,應追求「路徑最短化」。
5-4誤用四:自動化等於失去控制
有些人擔心「原理 25 自助服務」會讓人失去對系統的掌控。事實上,好的自動化是「輔助人做決策」,而非「取代人的判斷」。
關鍵是保留「人工介入」的機制:自動調整有上下限保護、異常時能切換回手動模式、重要決策仍需人工確認。真正的自主系統,是在人設定的範圍內自主運作,而不是完全不需要人。
六、總結、金句與行動呼籲
1.總結:什麼時候優先用這類原理?
增強控制類發明原理的核心,是讓系統的狀態可見、操作可行、運作自主。當你遇到以下狀況時,這一類原理通常是最佳切入點:
- 系統難以操作:步驟複雜、介面不直覺、必須依賴特定人員才能運作
- 狀態難以掌握:運作像黑箱,問題發生了才知道,缺乏即時回饋
- 調整牽連過廣:修改一個設定影響到太多地方,沒人敢輕易調整
- 品質不穩定:同樣的流程,不同人做、不同時間做,結果差異很大
- 需要持續人工盯著:系統無法自我維持,一旦沒人看著就容易出問題
增強控制類發明原理的本質,不是增加管理。
而是設計系統,使:
- 狀態可見
- 調整容易
- 運作穩定
真正成熟的系統,不是更複雜,而是更穩定 。創新不只是為了加速,更是為了讓系統學會自己跑得穩。
2.核心金句
控制不是管死,而是設計得不需要管。
看得見才能管得到。
用得準才不浪費力氣。
跑得穩才是真正高效。
效率讓你跑得快。
消除害處讓你不出事。
增強控制,讓你可預期。
控制,是讓系統自己知道:現在在哪裡、偏離多少、怎麼回來。
真正成熟的系統,不是更複雜,而是更可預期。
最好的控制,是設計得讓人感覺不到控制。
3.行動建議:
步驟一:用三個維度診斷現狀
選一個你覺得「最難管」的系統或流程,用本文的三個維度(可觀測性、可調整性、自主性)各問一個問題。找出最弱的維度,那就是你的優先改善起點。不要試圖一次改善所有問題,集中在影響最大的瓶頸。
步驟二:問一句關鍵問題(不要急著加功能)
先問:「現在系統中有哪個狀態,是我看不到的?有哪個操作,是難以調整的?有哪個環節,是需要人一直盯著的?」不要急著加更多規定或設備。
步驟三:對應原理,強迫產生三個方案
根據你的診斷,對照對應的原理編號(感知層:23, 24, 26;執行層:12, 13, 16;進化層:25, 27),強迫自己產生至少三個改善方案。先有三個方向,才有機會找到「既看得見、又用得準、還跑得穩」的解。記住:優先選擇「減法」而非「加法」——簡化 > 自動化 > 增加功能。
如果第一篇讓你學會「快狠準」,第二篇讓你學會「穩安全」,那這一篇,讓你學會:讓系統可預期。
在下一篇文章中,我們將進一步探討「系統協調(Coordination)」類發明原理,讓你了解當每個部分都控制得很好了,如何讓整體運作得更和諧——真正達到「做得快(效率)、做得乾淨(無害)、做得準(控制)、做得和諧(協調)」的境界。
希望這篇文章能幫你快速掌握增強控制的精華!如果你想針對其中的特定原理深入討論,隨時告訴我,我們可以一起激盪出更多實戰方案!
延伸閱讀:TRIZ理論
TRIZ理論與實務:讓你成為發明達人(2版)https://reurl.cc/k83VVx
TRIZ(萃思) 八大工具一次看!激發系統化創新的 8個方法、案例分享 (1-0) https://reurl.cc/VmERlR
TRIZ(萃思)的簡介1:前人的智慧、系統化創新(1-1) https://reurl.cc/LnGyr9
TRIZ(萃思)的簡介2:TRIZ的重要觀念:創新的五個等級、系統完備性五元件、系統演進的四階段(1-2) https://reurl.cc/XaW5gj
TRIZ(萃思)的簡介3:TRIZ的兩個基礎工具:要素分析、系統演化九宮格(1-3) https://reurl.cc/aMNqlG
TRIZ(萃思)的簡介4:TRIZ創新學:從三星起死回生到學術升等,揭秘企業與教育的系統化創新利器(1-4) https://reurl.cc/MMbNbX
TRIZ(萃思)的簡介5:學習 TRIZ 不踩雷:如何判斷你學到的理論是「完整且有效」的?(1-5) https://reurl.cc/bNkbaE
TRIZ(萃思)的應用1:「宏福苑大火」的TRIZ分析(1-6) https://reurl.cc/dqyGmD
TRIZ(萃思)的應用2:「花蓮馬太鞍溪堰塞湖溢流釀嚴重災情」的TRIZ分析(1-7) https://reurl.cc/aMR9RZ
TRIZ(萃思)的應用3:「北捷隨機殺人」的TRIZ分析(1-8) https://reurl.cc/Ab9pae
TRIZ(萃思)的發明原理3上班族適用的提高效率類發明原理,讓你運作快、狠、準(1-21)https://reurl.cc/9bjQgV
TRIZ(萃思)的發明原理4上班族適用的消除害處類發明原理:讓系統更穩、更安全、活更久的關鍵能力(1-22)https://reurl.cc/yKzRz8